Gliders
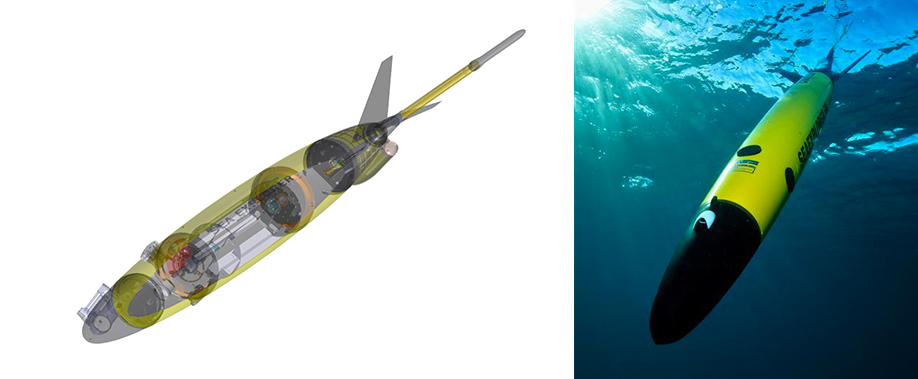
A glider is a torpedo-shaped undersea robot that, equipped with specific physical and/or biogeochemical sensors, is used as a scientific autonomous platform to sample and observe Ocean properties (e.g. temperature, salinity, concentration in chlorophyll-a, oxygen, nitrates, particles and colored dissolved substances). Propellerless it is able to dive as deep as 1000 meters and travels in a zigzag pattern through the water column.
The glider moves by changing its buoyancy, which mainly is achieved by a change in its overall volume. As for a profiling float, to dive, a valve opens allowing a certain volume of oil to be pumped from a flexible bladder outside the glider’s hull into its interior. While the gliderÆs volume decreases, the mass of the glider remains the same. Its buoyancy thus decreased makes the glider sink. In a reversed process, the glider ascends.
Apart from the use of batteries to power the pump during inflection the glider propagates independently. Wings transform the vertical velocity into a horizontal movement. It can be autonomous for a period of 1-2 months, i.e. 1000-2000 km. During its mission, the equipped glider continuously gathers oceanographic information on profiles within the water column. These acquired observations are transmitted periodically in near real-time to a marine laboratory on land.
Data transfer is undertaken through iridium (or Freewave) telemetry when the glider surfaces. During this surfacing the antenna fin raises for optimal communication, and for GPS location. Scientists can then send new instructions to the glider as e.g. changes in mission parameters.
During its mission, only minimal maintenance is required and the small amount of power needed for functioning makes gliders valid for a large series of operation types. These range from endurance (monitoring) lines supporting operational oceanography to the cartography of serious environmental concerns e.g. oil pollution, (harmful) algae blooms, and jellyfish occurrences. However, i.a. due to its handling and its overall costs (even though the costs per data set are considered as relatively inexpensive), gliders are still preferred for conducting research within the coastal regions.
Technical details of an undersea glider
|
|
|
Full size |
~1.8 m |
|
Weight |
~50 kg |
|
Energy |
batteries |
|
Velocity |
vertical: 20-30 cm/s |
|
Depth range |
0-1000 m |
|
Max. mission duration (dependent e.g. on measurements) |
1-2 months |
|
Max. mission range |
1000-2000 km |
|
Navigation |
dead-reckoning, GPS, |
|
Spatial scale Temporal scale |
coastal-regional |
|
Deployment |
from glider ports, |
|
Two examples of implemented sensors |
(1) CTD (2) bio-optical sensor |
|
Communication |
Iridium, Freewave, Argos |